News
Contact:
Steve Bradt
617-496-8070
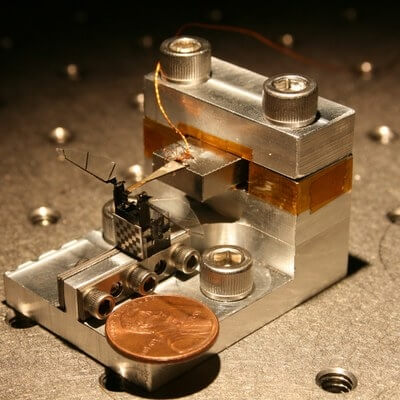
CAMBRIDGE, Mass. - Sept. 2, 2010 - Engineers at Harvard University have created a millionth-scale automobile differential to govern the flight of minuscule aerial robots that could someday be used to probe environmental hazards, forest fires, and other places too perilous for people.
Their new approach is the first to passively balance the aerodynamic forces encountered by these miniature flying devices, letting their wings flap asymmetrically in response to gusts of wind, wing damage, and other real-world impediments.
"The drivetrain for an aerial microrobot shares many characteristics with a two-wheel-drive automobile," says lead author Pratheev S. Sreetharan, a graduate student in Harvard's School of Engineering and Applied Sciences. "Both deliver power from a single source to a pair of wheels or wings. But our PARITy differential generates torques up to 10 million times smaller than in a car, is 5 millimeters long, and weighs about one-hundredth of a gram -- a millionth the mass of an automobile differential."
High-performance aerial microrobots, such as those the Harvard scientists describe in the Journal of Mechanical Design, could ultimately be used to investigate areas deemed too dangerous for people. Scientists at institutions including the University of California, Berkeley, University of Delaware, University of Tokyo, and Delft University of Technology in the Netherlands are exploring aerial microrobots as cheap, disposable tools that might someday be deployed in search and rescue operations, agriculture, environmental monitoring, and exploration of hazardous environments.
To fly successfully through unpredictable environments, aerial microrobots -- like insects, nature's nimblest fliers -- have to negotiate conditions that change second-by-second. Insects usually accomplish this by flapping their wings in unison, a process whose kinematic and aerodynamic basis remains poorly understood.
Sreetharan and his co-author, Harvard engineering professor Robert J. Wood, recognized that an aerial microrobot based on an insect need not contain complex electronic feedback loops to precisely control wing position.
"We're not interested so much in the position of the wings as the torque they generate," says Wood, an associate professor of electrical engineering at Harvard. "Our design uses 'mechanical intelligence' to determine the correct wing speed and amplitude to balance the other forces affecting the robot. It can slow down or speed up automatically to correct imbalances."
Sreetharan and Wood found that even when a significant part of an aerial microrobot's wing was removed, the self-correction engendered by their PARITy (Passive Aeromechanical Regulation of Imbalanced Torques) drivetrain allowed the device to remain balanced in flight. Smaller wings simply flapped harder to keep up with the torque generated by an intact wing, reaching speeds of up to 6,600 beats per minute.
The Harvard engineers say their passive approach to regulating the forces generated in flight is preferable to a more active approach involving electronic sensors and computation, which would add weight and complexity to devices intended to remain as small as lightweight as possible. Current-generation aerial microrobots are about the size and weight of many insects, and even make a similar buzzing sound when flying.
"We suspect that similar passive mechanisms exist in nature, in actual insects," Sreetharan says. "We take our inspiration from biology, and from the elegant simplicity that has evolved in so many natural systems."
Sreetharan and Wood's work was funded by the National Science Foundation.
###
NOTE: High-resolution images of aerial microrobots are available.
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.