News

The TacTip, a 3D-printed optical tactile sensor developed at Bristol Robotics Laboratory, won first prize in the Contributions in Soft Robotics Research category. (Image courtesy of the Bristol Robotics Laboratory.)
From low-cost tactile sensors to undersea flapping fins, the four projects selected as winners of the 2016 Soft Robotics Competition showcase the diversity of this rapidly growing field.
Now entering its third year, the competition was developed by Conor Walsh, Associate Professor of Mechanical and Biomedical Engineering at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), and Dónal Holland, Assistant Professor at University College Dublin and Associate at SEAS, as a way to encourage individuals to take advantage of the resources provided in the open-source Soft Robotics Toolkit. They are now seeking entries for the 2017 Soft Robotics Competition.
The United Kingdom’s Bristol Robotics Laboratory took home first prize in the Contributions in Soft Robotics Research category for TacTip, a 3D-printed optical tactile sensor. The device, which has been under development for more than seven years, acts as a cheap, artificial fingertip that can be easily built and customized with a 3D printer. The sensors, which can be mounted on robotic arms or hands, could enable future robots to have human-like dexterity.
“It is great to know the TacTip project is being recognized and will gain exposure, which could lead other groups to explore applications of tactile sensing within soft robotics,” said Nathan Lepora, team leader and senior lecturer in robotics and computational neuroscience at the University of Bristol. “It is also nice to be featured among the other great soft robotics projects on the website.”
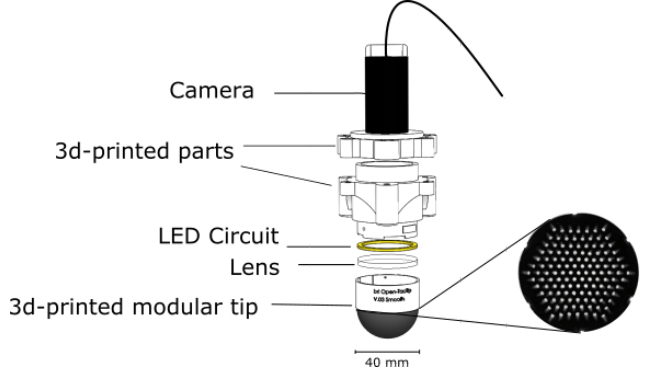
This figure shows the components of the TacTip Sensor. (Image courtesy of the Bristol Robotics Laboratory.)
In the College-Level Soft Robotics Design Competition, the team from Worcester Polytechnic Institute (WPI) claimed first prize for their Bio-Inspired Manta Ray Robot. The team developed a fin made from molded silicone that will flap as the channels inside are pressurized and depressurized. The fin is designed to power an autonomous underwater vehicle, enabling these robotic explorers to quickly and smoothly glide through uncharted reaches of the ocean.
“This project was ambitious, but very rewarding,” said team member Joshua Fuller, who graduated from WPI in 2016 with a bachelor’s degree in mechanical engineering. “We all learned a lot about planning project timelines, and how to squeeze cost and time out of the process. Participating in the Soft Robotics Competition was a great opportunity because it allowed us to see how the work we were doing compared to our peers.”

The completed Bio-Inspired Manta Ray Robot prototype awaits testing. (Photo courtesy of the Worcester Polytechnic Institute.)
In the High School Design Competition, a new category in 2016, two winners were named. Aidan Leitch, a freshman at Horace Greeley High School in Chappaqua, N.Y., created a Pneumatic Deformation Sensor, which is a soft air bladder connected to an electrical pressure sensor and microcontroller that provides real-time feedback on how it deforms. Harrison Young, a recent graduate of Robbinsville High School in Robbinsville, N.J., developed the Fabric-Reinforced Controlled Motion Robot, which uses silicone bladders in a fabric sleeve to mimic the basic locomotive methods of both an earthworm and an inchworm.
“The inspiration for my robot was search and rescue operations. I wanted to make a robot that was agile enough to successfully navigate unknown environments,” Young said. “The most gratifying part of this experience was seeing my ideas come to life.”

A side view of the Fabric-Reinforced Controlled Motion Robot. (Image courtesy of Harrison Young.)
Individuals and teams from around world submitted more than 80 designs for the 2016 competition. Holland said he was especially impressed with the increased number and high quality of submissions to the college and high school design categories. An international panel of nine robotics researchers selected the winners.
All entrants were required to submit detailed documentation that will be incorporated into the Soft Robotics Toolkit. The toolkit, which includes contributions from researchers from Harvard and other institutions, provides a set of intellectual tools that one can use to design and construct a robot using soft, flexible materials. It includes resources such as step-by-step instructions on building actuators and sensors, lists of suggested materials, and how-to fabrication videos.
“These competitions are important on two fronts. First, we want to encourage researchers to share very detailed information on the soft robotics projects they are working on, so others could replicate that work,” Holland said. “We also want to entourage students in college or high school to make use of the technology and information that is being shared by these research groups. They are coming up with novel designs that researchers oftentimes wouldn’t even consider, so we really value their contributions.”
This video shows the TacTip, the winning entry in the Contributions in Soft Robotics Research category.
Enter the 2017 Soft Robotics Competitions
Registration is now open for the third annual Soft Robotics Competition. Entries are sought in three categories: the High School Soft Robotics Design Competition, College Soft Robotics Design Competition, and Soft Robotics Research Challenge. All entrants must submit project titles and descriptions by the end of February. The competition will conclude on June 12 and winners will be announced in July.
Topics: Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Press Contact
Adam Zewe | 617-496-5878 | azewe@seas.harvard.edu


