News
The robot crawled across the desolate landscape, its six legs digging into the reddish-brown dust as it trundled off in the direction of the lost astronaut’s last known GPS coordinates.
Back at home base, a team of technicians nervously scanned the horizon through the robot’s camera feed as they remotely guided the machine closer to where they hoped to find their lost comrade. Time was of the essence—if the technicians weren’t able to locate the astronaut soon, it would hurt their team’s score.
This was not a Martian search-and-rescue mission, but rather one test organized during the 2018 Canadian International Rover Challenge. The technicians, students in the Harvard Undergraduate Robotics Club at the John A. Paulson School of Engineering and Applied Sciences, piloted the Mars Rover they designed and built through a number of competitive tasks during the three-day challenge in the badlands of east-central Alberta.
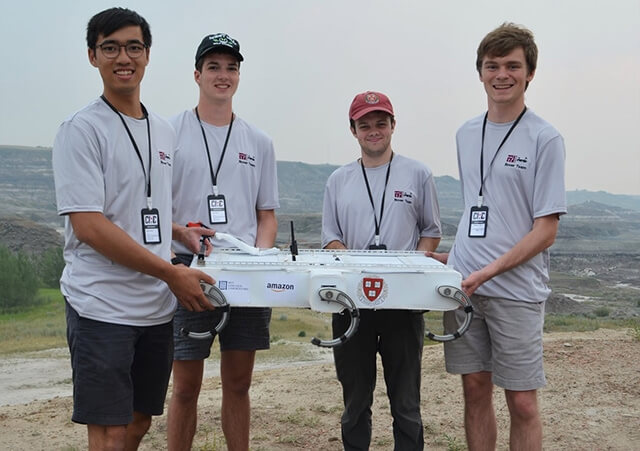
Harvard Undergraduate Robotics Club Mars Rover team members (from left) Albert Chien, S.B. ’19, a mechanical engineering concentrator, Alex Wulff, S.B. ’21, an electrical engineering concentrator, Robert Anderson, S.B. ’19, a mechanical engineering concentrator, and Matthew Giles, S.B. ’21 piloted their six-legged rover through numerous challenges in the Canadian International Rover Challenge. (Photo courtesy of the Harvard Undergraduate Robotics Club)
Besides search-and-rescue, rovers were tasked with locating and repairing a piece of simulated space equipment. They had to collect and transport certain minerals and materials, and also travel to different locations to take photos and conduct soil analysis.
“The competition was hugely beneficial because, up to this point, we’d only been driving our rover around the labs and in Cambridge. The chance to test the rover in different terrains in a much more analytical manner was an amazing experience,” said Robert Anderson, S.B. ’19, a mechanical engineering concentrator and project co-lead. “It allowed us to see what parts of our design were very robust and worked well and what parts need to be improved for next year’s competition.”
The Harvard team’s robot stood out (literally) from other competitors because it was the only robot that walked on legs instead of driving on wheels.
The rover, two years in the making, has six crescent-shaped legs that carry the rectangular chassis across the landscape. A front-mounted arm has multiple degrees of freedom so team members can manipulate it in any direction. Camera equipment provides visual feedback and the control system enables team members to communicate with the rover remotely, check its status, and reset motors if there is an error.
The legs, and the walking algorithm that controlled them, were the most challenging part of the rover design, Anderson said.
The team chose to build legs from carbon fiber, a material they had little experience with, due to its light weight and the speed of the 3D printing process. Andrea Rodriguez-Marin Freudmann, S.B. ’20, a mechanical engineering concentrator, recalled watching Youtube videos that explained how to vacuum seal the finicky material.
Each leg was controlled by its own motor and actuator, and the intricate electrical work involved in each element required patience and collaboration, she said.
“There were moments where I didn’t think it was going to happen,” she said. “Our unusual approach was a big gamble, and the fact that we managed to pull it off was very impressive. What I really took away from this project is that success or failure doesn’t depend on how smart your people are, necessarily; it really depends on how dedicated they are.”

Teammates Robert Anderson and Matthew Giles, S.B. ’21, work quickly to make repairs to their Mars Rover during the competition. (Photo courtesy of the Harvard Undergraduate Robotics Club)
Mechanical engineering concentrator and project co-lead Albert Chien, S.B. ’19, recalls spending many late nights in the Active Learning Labs, using computer models to figure out how all the parts would fit together. Determining the optimal chassis size was a puzzle, since it needed to fit all the necessary electronic components while remaining as light as possible.
The complexity of those many components also presented a challenge. Everything, from the carbon fiber rods holding the frame together to the communications software and hardware, needed to work as one cohesive robot, said electrical engineering concentrator Alex Wulff, S.B. ’21.
“Most of our subsystems are interdependent on other subsystems, so changes to one small part of the rover affect many other parts,” he said. “For example, a small modification to the design of our legs necessitated changes in the algorithms responsible for making the robot walk. Everything required an immense amount of planning, which both slowed us down and helped us create a better rover.”
Things didn’t always go smoothly during the competition, either.
The rover’s legs occasionally became mired in tall grass that slowed its progress. During several challenges, a leg fell off the rover, but since the team had used such a resilient design, and each leg operated with an independent motor and actuator, the robot was able to keep moving and complete the task.

Giles and Anderson are ready for a simulated space adventure. (Photo courtesy of the Harvard Undergraduate Robotics Club)
Up against tight time limits, the students worked rapidly to make adjustments when things went wrong. For instance, the team had to improvise when they realized the vision and communications systems weren’t working properly.
“We found that those two signals were actually interfering with each other,” Chien explained. “In order to solve that problem, we creatively attached a bamboo pole on our rover, on the fly, and used it to separate the two radio signals far enough that we could get a decent image from the live feed while simultaneously being able to control the rover.”
Students worked into the wee hours of the morning, using everything from screw drivers and wrenches to duct tape and zip ties, to keep their rover in top condition for each challenge, Chien said.
Despite the stress, uncertainty, and frenzy of the three-day competition, it was fun and rewarding to see the rover in action after two years of work, Anderson said.
“I’m most proud of the fact that we were able to take the relatively ambitious idea of a walking robot, design and build it in the timeframe we had, and compete alongside much more experienced teams,” he said. “We wanted to be different and bring some new insights and new designs to this realm. We wanted to push the envelope and our engineering abilities to the max.”
Topics: Robotics, Student Organizations
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.