News

Researchers tested this robot in snow, submerged it in water, walked it through flames, and even ran it over with a car. After each experiment, it emerged unscathed. (Photo courtesy of Ned Brown/Harvard University.)

Even a New England winter can't stop this beast. (Photo courtesy of Harvard Microrobotics Laboratory.)
When it comes to soft robots, researchers have finally managed to cut the cord.
Developers from Harvard’s School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering have produced the first untethered soft robot—a quadruped that can stand up and walk away from its designers.
Working in the lab of Robert Wood, the Charles River Professor of Engineering and Applied Sciences, a team of researchers that included Kevin Galloway, Michael Karpelson, Bobak Mosadegh, Robert Shepherd, Michael Tolley, and Michael Wehner was able to scale up earlier soft-robot designs, enabling a single robot to carry on its back all the equipment it needs to operate—microcompressors, control systems, and batteries. The design is described in a paper in Soft Robotics that appeared online Sept. 1.
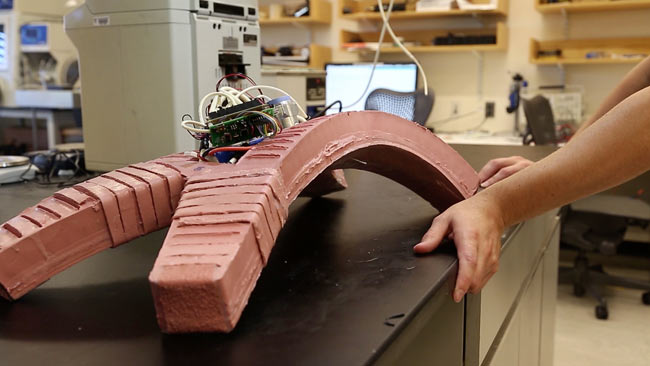
The soft robot, shown here in the Harvard Microrobotics Laboratory, is strong enough to carry all the power and controllers it requires. (Photo courtesy of Ned Brown/Harvard University.)
“Earlier versions of soft robots were all tethered, which works fine in some applications, but what we wanted to do was challenge people’s concept of what a robot has to look like,” said Tolley, a research associate in materials science and mechanical engineering at the Wyss Institute and the study’s first author. “We think the reason people have settled on using metal and rigid materials for robots is because they’re easier to model and control. This work is very inspired by nature, and we wanted to demonstrate that soft materials can also be the basis for robots.”
Compared with earlier soft robots, which were typically no larger than a steno pad, the system designed by Tolley and colleagues is huge, measuring more than a half-meter in length and capable of carrying as much as 7½ pounds on its back.
The design process, however, was about more than scaling up the smaller robots.
“As soon as you start thinking about putting the basic components you need to make this work—microcompressors, controllers, and batteries—on an untethered robot, you need a design that can carry those parts,” Tolley said. “You need to think about something that can handle much higher pressures, so there are materials challenges and there are design challenges and there are control challenges.”
Read the entire article in the Harvard Gazette
Untethered soft robot
Topics: Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Robert J. Wood
Harry Lewis and Marlyn McGrath Professor of Engineering and Applied Sciences
Press Contact
Caroline Perry


